
欢迎您的来电
13785700101





飞机装配工装应用研究和工装夹具的定位问题
文章摘要:
在制造业企业中柔性化的着眼点主要在机床和工装两个方面,中、大批量少品种生产中所用的FMS,常采用可换主轴箱的加工中心;中、小批量多品种生产中所用的FMS,三维
[一]、柔性制造系统在制造业中应用研究
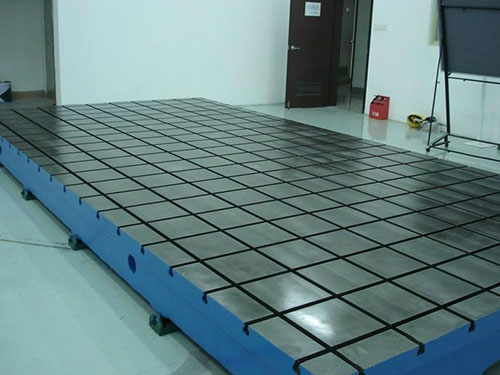
制造业企业加工设备主要采用加工中心和数控车床,前者用于加工箱体类和板类零件,后者则用于加工轴类和盘类零件。在制造业企业中柔性化的着眼点主要在机床和工装两个方面,中、大批量少品种生产中所用的FMS,常采用可换主轴箱的加工中心;中、小批量多品种生产中所用的FMS,三维焊接平台工装柔性化主要采用夹具,这样可以获得的生产效率。
1、工箱体类零件生产线
箱体类零件的主要加工部分均是由全柔性加工中心组成,几个加工中心组成一个柔性制造单元(FMC)。每个FMC前面是上料辊道,后面是下料辊道及检测站。各个柔性制造单元之间通过自动辊道或机械手连接起来,其中还包括所的清洗、研磨、压装、试漏、在线测量、线外测量设备以及切削液集中处理装置等。辅助设备一般采用通过式辊道输送上料,通过型号识别,选择相应的工位、试漏、拧紧程序。在柔性制造单元内,整线设有数个机械手,由全自动机械手进行上下料。在生产线的自动辊道上,设置有产品型号自动识别装置,机械手、辊道、加工中心之间通过总线连接起来,由数控系统自动控制各部分的一致性。同时,控制计算机还能根据各机床的加工情况,选择的上下料顺序,并根据设定的范围,将需要抽检的工件自动放入检测站。
2、轴类零件生产线
轴类生产线也是由加工中心、CNC自动车床和全自动磨,以及抛光、清洗及检测等各个柔性制造单元FMC所组成的柔性制造系统FMS。该FMC用加工中心来代替原来的铣床,要求数控系统不仅能完成通常的加工功能,而且还应具备自动测量、自动上下料、自动换刀、自动换主轴头、自动误差补偿、自动诊断、进线和联网功能,特别是依据用户的不同要求,方便灵活地配置和集成。生产率提高了很多倍,而且产品、质量好。
例如:凸轮轴生产线内的机床选用目前的系统来实现FMS的自动控制,通过制造企业技术人员与机床、控制系统商的共同研究,在原有平台上新扩展和了多种控制功能和软件,如端面加工单元。同时,生产线的自动控制系统还扩展了主动检测功能,在切削过程中实时对加工尺寸进行检测,并将数据反馈至控制系统,随机修正切削参数,以加工精度。凸轮轴生产线能够共线加工多种型号的凸轮轴,加工长度范围300一600mm的凸轮轴。凸轮轴生产线的运储系统还考虑到高湿环境以及地区地基的特点,增加了温度的自动补偿以及地基下沉补偿功能。系统能够周期性地检测外界环境的变化以及自身精度的差异,通过系统中模块化软件的计算,进行自我诊断及补偿,减少定位偏差。
3、夹具在数控机床中的应用
夹具数控机床有许多不同于普通机床的要求:粗加工时要求夹具具有很好的刚度,能承受大功率、高速切削;精加工时要求工件在夹具中的定位及夹紧误差;为提高工效,要求夹具元件能大、中融合一体,安装在同一块基础板上,以适应单件或多件同时加工等。当使用多夹具基础板时,既可组装单个大零件夹具,又可组装多个中小零件夹具,工效高,柔性好。些尺寸较大、形状复杂、要求精度较高、定位压紧有困难的零件,单纯用夹具无法完成的,可以采取以下方法是设计零件配合夹具元件使用。和使用的是设计制造定位心轴和钻模板。
柔性制造技术由于其、灵活的特性使其成为实施敏捷制造、并行工程、精益生产和智能制造系统的基础,且应用日益广泛,已成为整个机构制造的核心技术,FMS是现代生产方式的主流方向和共同基础。
三维焊接平台夹具系统的组成包括一组三维工装台和一组标准附件。其中,三维工装台由五面孔系平台和机架组成。所谓标准附件是有统一图纸并按尺寸精度要求经机械加工完成的具有互换性的零件,包括各类型的定位角铁、压紧件、连接件、紧固件、支承件。
[二]、工装夹具的定位问题
工装夹具在运用于机械加工时,需要明确基本的定位问题,把定位问题处理到位了,那么机械加工的度也就准确了,同时也在无形中提高机械加工的质量。
1、工件的六点定位原理
工件在尚未定位的阶段,往往是空间的直角坐标系呈现出六个方向自由度的形态,而对工件实行定位之目的便是借助于的手段来限制工件的自由度。工件的六点定位原理,是运用六个支撑点来分别限制自身的六个自由度,使用此种方法有利于地确定工件空间的所在位置。
2、工件的四种定位方法
(1)对工件实行“定位”。(2)对工件实行“不定位”。(3)对工件实行“欠定位”。(4)对工件实行“过定位”。
3、工件定位要注意的问题
(1)工件的定位与加紧是有很大区别的
机械加工,实际是对工件进行加工,在开展这项工作时大多在空间上存在不确定性。
(2)工件中六点定位的“点”大有深意
工件中的六点定位“点”,其作用是限制工件的自由度,并非是单纯的机械接触点。
下一篇:没有了

